Когато системата за подпомагане на паркирането на заден ход е активирана, контролният модул на системата осветява светодиода в бутона за превключване, активира сензорите и командва системата да издаде единичен звуков сигнал, за да потвърди активирането на системата. Ако обект навлезе в обхвата на сензора, веднага ще прозвучи поредица от звукови предупредителни сигнали, когато системата се включи.
Ако работата на системата за помощ при паркиране не е необходима, тогава тя може да бъде временно деактивирана чрез натискане на бутона за превключване. За превозни средства, оборудвани само със задни сензори, системата може да се активира отново чрез повторно натискане на ключа или чрез изключване и повторно включване на запалването. След това системата ще се включи автоматично, когато се избере задна предавка. Системата остава активна при превключване от задна към неутрална. Това отчита вероятността водачът да продължи (по някакъв начин) да движи автомобила назад с трансмисия в неутрално положение.
Когато е свързано ремарке, модулът за помощ при паркиране получава сигнал през CAN шината от централната електрическа кутия. При получаване на такъв сигнал модулът за управление на системата за помощ при паркиране спира системата.
При автомобили, оборудвани с предни и задни сензори, системата за помощ при паркиране се активира автоматично, когато запалването е включено (позиция II), селекторът не е в позиция Park и електронната ръчна спирачка е освободена. При скорост над 10 км/ч предната помощ при паркиране се деактивира. Когато скоростта на автомобила падне под 6 км/ч, предната система за помощ при паркиране ще възобнови работата си. Ако е задействана електронната ръчна спирачка (EPB) или селекторът е поставен в позиция за паркиране, системата за помощ при паркиране се деактивира.
Работа на сензорите
Модулът на системата за помощ при паркиране анализира данните, получени от сензорите, за да открие препятствия в полето на действие на сензорите. Ако не бъдат открити препятствия, системата за помощ при паркиране не издава звукови сигнали. Ако бъде открито препятствие, високоговорителят за помощ при паркиране ще издаде поредица от звукови сигнали.
Максималното разстояние за откриване на препятствия е 1800 мм. Когато бъде открито препятствие, докато го приближавате, разстоянието между звуковите сигнали намалява и на разстояние от приблизително 350 mm от препятствието звуковият сигнал става непрекъснат.
Ако няма допълнително намаляване на разстоянието между препятствието и централните сензори от момента на откриване на препятствието, тогава интервалът между звуковите сигнали не се променя. Ако даден обект бъде открит само от един сензор за ръбове, алармата ще спре след 5 секунди, ако няма промяна в разстоянието от обекта до сензора за ръбове.
Зона на откриване
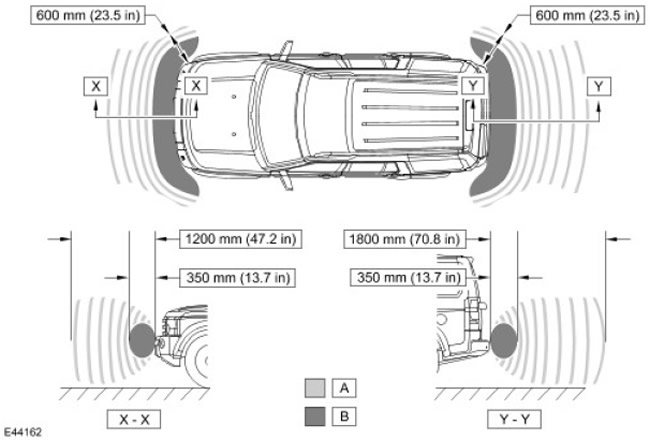
| Име на елемент | Каталожен номер на резервни части | Описание |
| А | - | Прекъснат предупредителен тон |
| Б | - | Непрекъснат предупредителен тон |
Открийте препятствие и изчислете разстоянието до него
Работейки в комбиниран режим на приемане/предаване, сензорът излъчва ултразвукови импулси и приема сигнали, отразени от препятствие. Контролният модул за помощ при паркиране усилва отразените сигнали и ги сравнява с програмираните прагове, за да изчисли разстоянието. Това се постига чрез определяне на времето, изминало между предаването и приемането на ултразвуковия сигнал.
Когато сензорът е в режим на приемане, той получава радиационни сигнали от съседния сензор. Този режим се използва за подобряване на точността на системата.
Цикълът на откриване на препятствие се състои в предаване и приемане на поредица от импулси от един сензор, работещ в комбиниран режим по команди на контролния модул на системата за помощ при паркиране. . След това компютърът превключва този, както и съседните сензори, за да приемат само отразения сигнал. След кратка пауза операцията се повтаря, но сега следващият сензор работи в комбиниран режим. Цикълът продължава, докато всичките 4 трансдюсера излъчват ултразвукови сигнали. Това отнема около 100 милисекунди. Контролният модул извършва няколко измервания на сигналите на един и същи сензор, за да елиминира случайни грешки в изчисленията.
Ако обектът е точно срещу сензора, разстоянието се изчислява от времето между предаването и приемането на сигнала. Ако препятствието се намира между два сензора, управляващият модул изчислява разстоянието от сигналите на двата сензора, решавайки проблема с триангулацията.
За да реши проблема с триангулацията, контролният модул трябва да знае разстоянието между отделните сензори в бронята. Тази информация се съхранява в паметта на контролния модул. Познавайки разстоянията от всеки сензор до препятствието и разстоянието между съседните сензори, контролният модул може да изчисли минималното разстояние от бронята на автомобила до препятствието.
Когато автомобилът се приближи до няколко препятствия едновременно, контролният модул определя разстоянието до най-близкото.
Коментари към тази статия