U kombiniranom načinu rada senzori emitiraju niz ultrazvučnih impulsa, a zatim se prebacuju na način primanja zvuka reflektiranog od prepreke unutar dometa. Primljeni reflektirani signali se pojačavaju i pretvaraju iz analognog u digitalni oblik u samom senzoru. Digitalni signal se prosljeđuje modulu pomoći pri parkiranju i uspoređuje s programiranim podacima u EEPROM-u modula. Upravljački modul prima te podatke od senzora putem linije za prijenos signala i izračunava udaljenost do prepreke iz vremenskog intervala između izlaganja prepreci i prijema reflektiranog signala. Trajanje impulsa određuje modul, koji pomoću senzora kontrolira frekvenciju izlaznog impulsa.
U načinu rada prijemnika, senzor prima impulse koje emitiraju susjedni senzori. Upravljački modul koristi te podatke za točno određivanje položaja i udaljenosti do prepreke.
Ako se ne otkriju prepreke, nema dodatnih upozorenja. Ako se otkrije prepreka, iz odgovarajućih prednjih ili stražnjih zvučnika čuju se ponavljani zvučni signali. Interval signaliziranja se smanjuje kako se smanjuje udaljenost između prepreke i vozila. Na udaljenosti od približno 250 mm zvučni signal postaje kontinuiran.
Ako se udaljenost između njega i vozila ne smanji nakon početne detekcije prepreke, ton upozorenja ostaje nepromijenjen ako središnji senzor detektira prepreku, ili se alarm prestaje oglašavati nakon 3 sekunde ako je prepreka detektirana uz ugao. senzor.
Sirene prestaju kada se vozilo pomakne iz brzine za vožnju unazad. Modul nastavlja pratiti udaljenost i nastavlja upozoravati ako se otkrije smanjenje udaljenosti.
Rad sustava se poništava kada se pritisne prekidač za pomoć pri parkiranju ili se isključi paljenje. Sustav se također poništava ako vozilo prijeđe više od 50 m ili ako brzina vozila prijeđe 30 km/h.
Sustav može detektirati da je prikolica spojena na vozilo pomoću srednje brze poruke CAN sabirnice iz modula prikolice. Kada modul za pomoć pri parkiranju otkrije da je prikolica povezana s vozilom, stražnji senzori su onemogućeni kako bi se spriječila kontinuirana upozorenja zbog blizine prikolice.
Modul pomoći pri parkiranju također sadrži softver koji kompenzira učinke mraza, leda ili kiše na senzore. Do kompenzacije zaleđivanja dolazi ako je vrijednost vanjske temperature primljena u poruci na CAN sabirnici srednje brzine s ploče s instrumentima manja od 6°C.
Izračun udaljenosti
NAPOMENA: A = Isprekidana sirena upozorenja; B = Kontinuirani zvučni signal
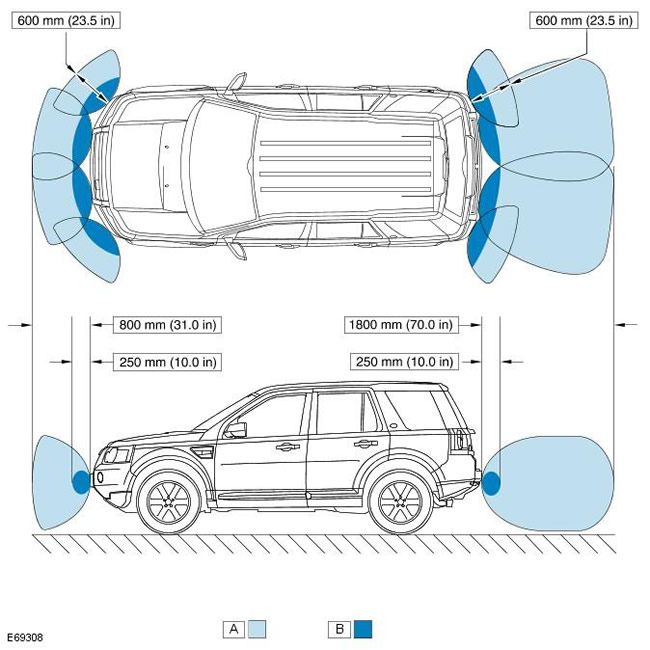
Maksimalni raspon detekcije za prednje senzore je 800 mm za središnje senzore i 600 mm za kutne senzore.
Maksimalni raspon detekcije za stražnje senzore je 1800 mm za središnje senzore i 600 mm za kutne senzore.
Komentari na ovaj članak