A kombinált üzemmódban az érzékelők ultrahang impulzusok sorozatát bocsátanak ki, majd átváltanak a hatótávolságon belüli akadályról visszaverődő hang vételének módjára. A vett visszavert jeleket felerősítik és analógból digitális formába alakítják át magában az érzékelőben. A digitális jelet továbbítják a parkolássegítő modulhoz, és összehasonlítják a modul EEPROM-jában lévő programozott adatokkal. A vezérlőmodul ezeket az adatokat a jelátviteli vonalon keresztül kapja az érzékelőtől, és az akadály expozíciója és a visszavert jel vétele közötti időintervallumból számítja ki az akadály távolságát. Az impulzus időtartamát a modul határozza meg, amely egy érzékelő segítségével szabályozza a kimeneti impulzus frekvenciáját.
Vevő üzemmódban az érzékelő a szomszédos érzékelők által kibocsátott impulzusokat veszi. A vezérlőmodul ezeket az információkat használja fel az akadály helyzetének és távolságának pontos meghatározására.
Ha nem észlel akadályt, nincs további figyelmeztetés. Ha akadályt észlel, ismételt sípolás hallható a megfelelő első vagy hátsó hangszórókból. A jelzési intervallum csökken az akadály és a jármű közötti távolság csökkenésével. Körülbelül 250 mm távolságban a hangjelzés folyamatos lesz.
Ha a távolság a közte és a jármű között az akadály első észlelése után nem csökken, a figyelmeztető hang változatlan marad, ha az akadályt a központi érzékelő észleli, vagy a riasztó 3 másodperc múlva leáll, ha az akadályt a kanyar érzékeli. érzékelő.
A kürtök leállnak, amikor a járművet hátrameneti fokozatból kiállítják. A modul továbbra is figyeli a távolságot, és folytatja a riasztást, ha távolságcsökkenést észlel.
A rendszer működése megszakad, ha megnyomják a parkolássegítő kapcsolót vagy kikapcsolják a gyújtást. A rendszer akkor is törlődik, ha a jármű 50 m-nél többet halad, vagy a jármű haladási sebessége meghaladja a 30 km/h-t.
A rendszer az utánfutó modultól érkező közepes sebességű CAN-busz üzenettel érzékeli, hogy egy pótkocsi csatlakozik a járműhöz. Amikor a parkolássegítő modul azt észleli, hogy egy utánfutó van csatlakoztatva a járműhöz, a hátsó érzékelők le vannak tiltva, hogy megakadályozzák a folyamatos figyelmeztetéseket az utánfutó közelsége miatt.
A parkolássegítő modul olyan szoftvert is tartalmaz, amely kompenzálja a fagy, jég vagy eső érzékelőkre gyakorolt hatását. A jegesedés kompenzációja akkor következik be, ha a középsebességű CAN buszon a műszerfalról üzenetben kapott külső hőmérsékleti érték 6°C-nál kisebb.
Távolság számítás
MEGJEGYZÉS: A = Szakaszos figyelmeztető kürt; B = Folyamatos hangjelzés
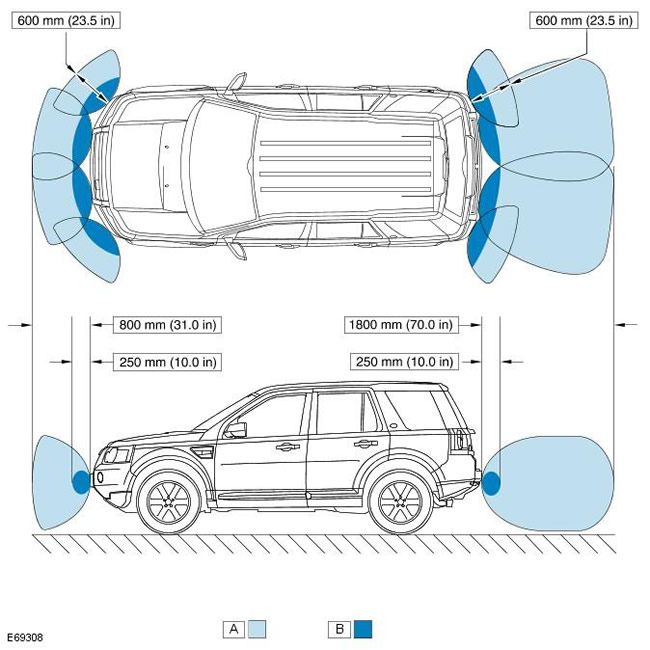
Az elülső érzékelők maximális érzékelési tartománya 800 mm a középső érzékelők és 600 mm a sarokérzékelők esetében.
A hátsó érzékelők maximális érzékelési tartománya a középső érzékelők esetében 1800 mm, a sarokérzékelők esetében pedig 600 mm.
Megjegyzések ehhez a cikkhez