In the combined mode, the sensors emit a series of ultrasonic pulses and then switch to the mode of receiving sound reflected from an obstacle within the range. The received reflected signals are amplified and converted from analog to digital form in the sensor itself. The digital signal is passed to the parking aid module and compared with the programmed data in the module's EEPROM. The control module receives this data from the sensor through the signal transmission line and calculates the distance to the obstacle from the time interval between the exposure of the obstacle and the reception of the reflected signal. The duration of the pulse is determined by the module, which, using a sensor, controls the frequency of the output pulse.
In receiver mode, the sensor receives pulses emitted by neighboring sensors. The control module uses this information to accurately determine the position and distance to the obstacle.
If no obstacles are detected, there are no additional warnings. If an obstacle is detected, repeated beeps are emitted from the corresponding front or rear speakers. The signaling interval decreases as the distance between the obstacle and the vehicle decreases. At a distance of approximately 250 mm, the sound signal becomes continuous.
If the distance between it and the vehicle does not decrease after the initial detection of an obstacle, the warning tone remains unchanged if the obstacle is detected by the central sensor, or the alarm stops sounding after 3 seconds if the obstacle is detected by the corner sensor.
The horns stop when the vehicle is moved out of reverse gear. The module continues to monitor the distance and resumes alerting if a decrease in distance is detected.
The operation of the system is canceled when the park assist switch is pressed or the ignition is turned off. The system is also canceled if the vehicle travels more than 50 m or the forward speed of the vehicle exceeds 30 km/h.
The system can detect that a trailer is connected to the vehicle using a medium speed CAN bus message from the trailer module. When the parking aid module detects a trailer is connected to the vehicle, the rear sensors are disabled to prevent continuous warnings due to the proximity of the trailer.
The parking assistance module also contains software that compensates for the effects of frost, ice or rain on the sensors. Icing compensation occurs if the outside temperature value received in the message on the medium speed CAN bus from the instrument panel is less than 6°C.
Distance calculation
NOTE: A = Intermittent warning horn; B = Continuous beep
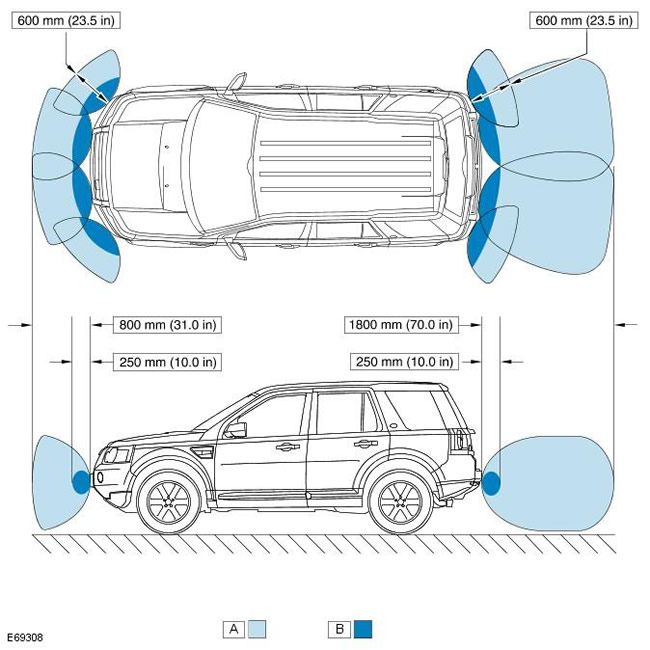
The maximum detection range for front sensors is 800 mm for center sensors and 600 mm for corner sensors.
The maximum detection range for the rear sensors is 1800 mm for the center sensors and 600 mm for the corner sensors.
Comments on this article