W trybie połączonym czujniki emitują serię impulsów ultradźwiękowych, a następnie przechodzą w tryb odbioru dźwięku odbitego od przeszkody znajdującej się w zasięgu. Odebrane odbite sygnały są wzmacniane i przetwarzane z postaci analogowej na cyfrową w samym czujniku. Sygnał cyfrowy przekazywany jest do modułu wspomagania parkowania i porównywany z danymi zaprogramowanymi w pamięci EEPROM modułu. Moduł sterujący odbiera te dane z czujnika za pośrednictwem linii transmisji sygnału i oblicza odległość do przeszkody na podstawie odstępu czasu między wyeksponowaniem przeszkody a odebraniem odbitego sygnału. Czas trwania impulsu jest określany przez moduł, który za pomocą czujnika kontroluje częstotliwość impulsu wyjściowego.
W trybie odbiornika czujnik odbiera impulsy emitowane przez sąsiednie czujniki. Moduł sterujący wykorzystuje te informacje do dokładnego określenia pozycji i odległości od przeszkody.
Jeśli nie zostaną wykryte żadne przeszkody, nie ma żadnych dodatkowych ostrzeżeń. W przypadku wykrycia przeszkody z odpowiednich głośników przednich lub tylnych emitowane są powtarzające się sygnały dźwiękowe. Interwał sygnalizacji zmniejsza się wraz ze zmniejszaniem się odległości między przeszkodą a pojazdem. W odległości około 250 mm sygnał dźwiękowy staje się ciągły.
Jeśli odległość między nim a pojazdem nie zmniejszy się po wstępnym wykryciu przeszkody, dźwięk ostrzegawczy pozostanie niezmieniony, jeśli przeszkoda zostanie wykryta przez centralny czujnik, lub alarm przestanie działać po 3 sekundach, jeśli przeszkoda zostanie wykryta za zakrętem czujnik.
Sygnały dźwiękowe zatrzymują się, gdy pojazd zostaje wyłączony z biegu wstecznego. Moduł kontynuuje monitorowanie odległości i wznawia alarmowanie w przypadku wykrycia zmniejszenia odległości.
Działanie systemu zostaje anulowane po naciśnięciu przełącznika wspomagania parkowania lub wyłączeniu zapłonu. System wyłącza się również, jeśli pojazd przejedzie więcej niż 50 m lub prędkość jazdy do przodu przekroczy 30 km/h.
System może wykryć, że przyczepa jest podłączona do pojazdu za pomocą komunikatu magistrali CAN o średniej prędkości z modułu przyczepy. Gdy moduł pomocy przy parkowaniu wykryje, że przyczepa jest podłączona do pojazdu, tylne czujniki są wyłączane, aby zapobiec ciągłym ostrzeżeniom z powodu bliskości przyczepy.
Moduł wspomagania parkowania zawiera również oprogramowanie, które kompensuje wpływ mrozu, lodu lub deszczu na czujniki. Kompensacja oblodzenia występuje, gdy wartość temperatury zewnętrznej odebrana w komunikacie na magistrali CAN o średniej prędkości z tablicy rozdzielczej jest mniejsza niż 6°C.
Obliczanie odległości
UWAGA: A = przerywany sygnał ostrzegawczy; B = ciągły sygnał dźwiękowy
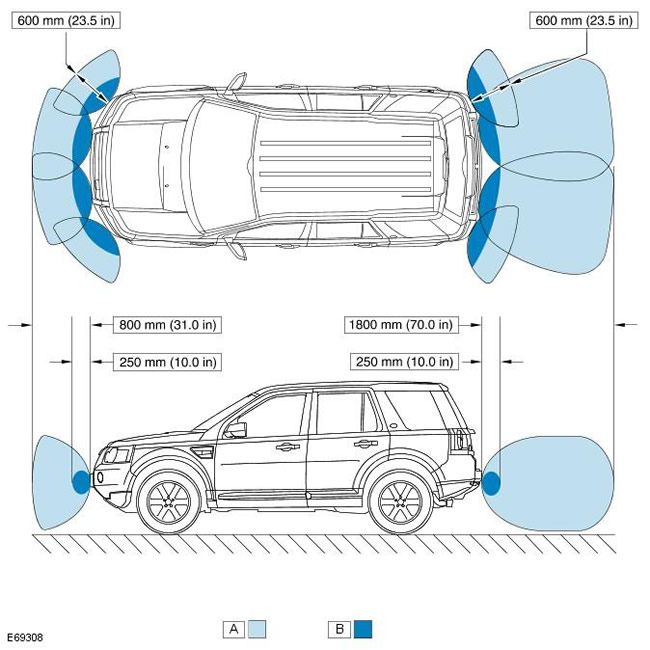
Maksymalny zasięg wykrywania dla czujników przednich wynosi 800 mm dla czujników środkowych i 600 mm dla czujników narożnych.
Maksymalny zasięg wykrywania dla czujników tylnych wynosi 1800 mm dla czujników środkowych i 600 mm dla czujników narożnych.
Komentarze do tego artykułu