Калі сістэма дапамогі пры паркоўцы заднім ходам актываваная, модуль кіравання сістэмы ўключае святлодыёдны індыкатар у кнопцы выключальніка, уключае датчыкі і аддае каманду на падачу адзіночнага гукавога сігналу, які пацвярджае ўключэнне сістэмы. Калі ў радыусе дзеяння датчыка з'яўляецца прадмет, то пры ўключанай сістэме неадкладна раздаецца паслядоўнасць гукавых папераджальных сігналаў.
Калі праца сістэмы дапамогі пры паркоўцы не патрабуецца, то яе можна на час адключыць, націснуўшы на кнопку выключальніка. Для аўтамабіляў, абсталяваных толькі заднімі датчыкамі, сістэму можна зноў уключыць, націснуўшы яшчэ раз на выключальнік або выключыўшы і зноў уключыўшы запальванне. Пасля гэтага сістэма аўтаматычна ўлучыцца пры выбары перадачы задняга ходу. Сістэма застаецца актыўнай пры пераключэнні з задняга ходу ў нейтральнае становішча. Гэтым улічваецца верагоднасць таго, кіроўца працягне (якім-небудзь спосабам) перамяшчаць аўтамабіль назад, паставіўшы скрынку перадач у нейтральнае становішча.
Пры падлучэнні прычэпа модуль сістэмы дапамогі пры паркоўцы атрымлівае сігнал па шыне CAN ад цэнтральнай электраразмеркавальнай скрынкі. Атрымаўшы такі сігнал, модуль кіравання сістэмай дапамогі пры паркоўцы прыпыняе функцыянаванне сістэмы.
На аўтамабілях, абсталяваных пярэднімі і заднімі датчыкамі, сістэма дапамогі пры паркоўцы аўтаматычна актывуецца, калі ўключана запальванне (становішча II), селектар не знаходзіцца ў становішчы Park і выключаны электронны стаяначны тормаз. Пры хуткасці руху звыш 10 км/г перадпакой сістэма дапамогі пры паркоўцы адключаецца. Пры зніжэнні хуткасці руху да 6 км/г праца перадпакоя сістэмы дапамогі пры паркоўцы аднаўляецца. Калі ўключаецца электронны стаяначны тормаз (EPB) або селектар ставіцца ў становішча Park, сістэма дапамогі пры паркоўцы выключаецца.
Праца датчыкаў
Модуль сістэмы дапамогі пры паркоўцы аналізуе дадзеныя, якія атрымліваюцца ад датчыкаў з мэтай выяўлення перашкод у поле дзеяння датчыкаў. Калі перашкоды не выяўлены, сістэма дапамогі пры паркоўцы не падае ніякіх гукавых сігналаў. Калі была выяўлена перашкода, дынамік сістэмы дапамогі пры паркоўцы выдасць серыю гукавых сігналаў.
Максімальная адлегласць выяўлення перашкод роўна 1800 мм. Пры выяўленні перашкоды, па меры набліжэння да яго прамежак паміж гукавымі сігналамі памяншаецца, і на адлегласці прыблізна 350 мм ад перашкоды гукавы сігнал становіцца бесперапынным.
Калі з моманту выяўлення перашкоды далейшае памяншэнне адлегласці паміж перашкодай і цэнтральнымі датчыкамі не адбываецца, то прамежак паміж падачай гукавых сігналаў не мяняецца. Калі аб'ект выяўлены толькі адным крайнім датчыкам, папераджальны сігнал спыніцца праз 5 секунд, калі не адбудзецца змены адлегласці ад аб'екта да крайняга датчыка.
Зона выяўлення
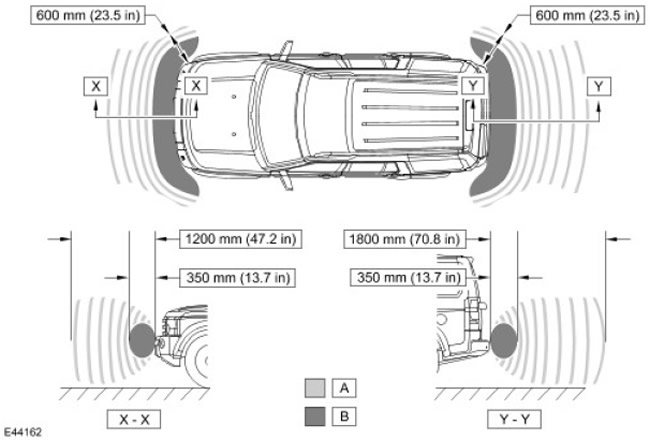
| Найменне пункта | Каталожны нумар запасной часткі | Апісанне |
| A | - | Перарывісты папераджальны гукавы сігнал |
| B | - | Бесперапынны папераджальны гукавы сігнал |
Выяўленне перашкоды і вылічэнне адлегласці да яе
Працуючы ў камбінаваным рэжыме прыёму/перадачы, датчык выпраменьвае ўльтрагукавыя імпульсы і прымае адлюстраваныя ад перашкоды сігналы. Модуль кіравання сістэмай дапамогі пры паркоўцы ўзмацняе адлюстраваныя сігналы і параўноўвае іх з закладзенымі ў праграме парогавымі значэннямі для вылічэння адлегласці. Гэта дасягаецца вызначэннем часу, які прайшоў паміж перадачай і прыёмам ультрагукавога сігналу.
Калі датчык працуе ў рэжыме прыёму, ён прымае сігналы выпраменьвання суседняга датчыка. Гэты рэжым выкарыстоўваецца для падвышэння дакладнасці працы сістэмы.
Цыкл выяўлення перашкоды складаецца ў перадачы і прыёме серыі імпульсаў адным датчыкам, якія працуюць у камбінаваным рэжыме па камандах модуля кіравання сістэмай дапамогі пры паркоўцы. . Затым кампутар перамыкае гэты, а таксама суседнія датчыкі ў рэжым толькі прыёму адлюстраванага сігналу. Пасля кароткай паўзы аперацыя паўтараецца, але зараз у камбінаваным рэжыме працуе наступны датчык. Цыкл працягваецца, пакуль усе 4 датчыка не выпраменьваюць ультрагукавыя сігналы. На гэта спатрэбіцца каля 100 мілісекунд. Модуль кіравання выконвае некалькі вымярэнняў сігналаў аднаго і таго ж датчыка, каб выключыць выпадковыя памылкі пры вылічэннях.
Калі аб'ект знаходзіцца строга насупраць датчыка, адлегласць разлічваецца па часе паміж перадачай і прыёмам сігналу. Калі ж перашкода размешчана паміж двума датчыкамі, модуль кіравання вылічае адлегласць па сігналах двух датчыкаў, вырашаючы задачу трыянгуляцыі.
Для рашэння задачы трыянгуляцыі модулю кіравання павінна быць вядома адлегласць паміж асобнымі датчыкамі ў бамперы. Гэтая інфармацыя захоўваецца ў памяці модуля кіравання. Ведаючы адлегласці ад кожнага датчыка да перашкоды і адлегласць паміж суседнімі датчыкамі, модуль кіравання можа вылічыць мінімальнае адлегласць ад бампера аўтамабіля да перашкоды.
Пры пад'ездзе аўтамабіля адначасова да некалькіх перашкод модуль кіравання вызначае адлегласць да найблізкага з іх.
Каментары да гэтага артыкула