Коли система допомоги при паркуванні заднім ходом активована, модуль управління системи включає світлодіодний індикатор в кнопці вимикача, включає датчики та віддає команду на подачу одиночного звукового сигналу, що підтверджує включення системи. Якщо в радіусі дії датчика з'являється предмет, то при включеній системі негайно лунає послідовність звукових попереджувальних сигналів.
Якщо робота системи допомоги при паркуванні не потрібна, то її можна на якийсь час відключити, натиснувши на кнопку вимикача. Для автомобілів, оснащених лише задніми датчиками, систему можна знову увімкнути, натиснувши ще раз на вимикач або вимкнувши та знову ввімкнувши запалювання. Після цього система автоматично увімкнеться при виборі передачі заднього ходу. Система залишається активною при перемиканні із заднього ходу в нейтральне положення. Цим враховується ймовірність того, водій продовжить (будь-яким способом) переміщати автомобіль назад, поставивши коробку передач в нейтральне положення.
При підключенні причепа модуль системи допомоги під час паркування отримує сигнал по шині CAN від центральної електророзподільної коробки. Отримавши такий сигнал, модуль керування системою допомоги під час паркування припиняє функціонування системи.
На автомобілях, оснащених передніми та задніми датчиками, система допомоги при паркуванні автоматично активується, якщо включене запалення (положення II), селектор не знаходиться в положенні Park і вимкнено електронне гальмо стоянки. При швидкості руху понад 10 км/год передня система допомоги під час паркування відключається. При зниженні швидкості руху до 6 км/год робота передньої системи допомоги під час паркування відновлюється. Якщо вмикається електронне гальмо стоянки (EPB) або селектор ставиться в положення Park, система допомоги при паркуванні вимикається.
Робота датчиків
Модуль системи допомоги при паркуванні аналізує дані, які отримують від датчиків з метою виявлення перешкод у полі дії датчиків. Якщо перешкоди не виявлено, система допомоги під час паркування не подає жодних звукових сигналів. Якщо було виявлено перешкоду, динамік системи допомоги під час паркування видасть серію звукових сигналів.
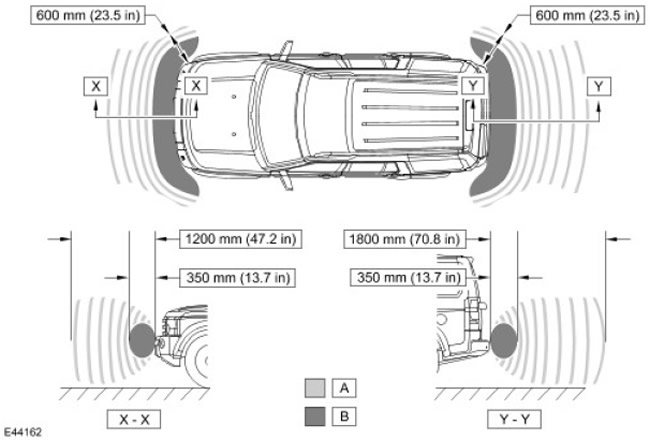
Максимальна відстань виявлення перешкод дорівнює 1800 мм. При виявленні перешкоди, у міру наближення до неї проміжок між звуковими сигналами зменшується, і на відстані приблизно 350 мм від перешкоди звуковий сигнал стає безперервним.
Якщо з моменту виявлення перешкоди подальше зменшення відстані між перешкодою та центральними датчиками не відбувається, то проміжок між подачею звукових сигналів не змінюється. Якщо об'єкт виявлено лише одним крайнім датчиком, попереджувальний сигнал припиниться через 5 секунд, якщо зміни зміни відстані від об'єкта до крайнього датчика не зміниться.
Зона виявлення
| Найменування пункту | Каталожний номер запасної частини | Опис |
| A | - | Уривчастий попереджувальний звуковий сигнал |
| B | - | Безперервний попереджувальний звуковий сигнал |
Виявлення перешкоди та обчислення відстані до неї
Працюючи у комбінованому режимі прийому/передачі, датчик випромінює ультразвукові імпульси та приймає відбиті від перешкоди сигнали. Модуль керування системою допомоги під час паркування посилює відбиті сигнали та порівнює їх із закладеними у програмі пороговими значеннями для обчислення відстані. Це досягається визначенням часу, що пройшов між передачею та прийомом ультразвукового сигналу.
Коли датчик працює у режимі прийому, він приймає сигнали випромінювання сусіднього датчика. Цей режим використовується для підвищення точності роботи системи.
Цикл виявлення перешкоди полягає у передачі та прийомі серії імпульсів одним датчиком, що працює в комбінованому режимі за командами модуля управління системою допомоги при паркуванні. . Потім комп'ютер перемикає цей, а також сусідні датчики в режим прийому відбитого сигналу. Після короткої паузи операція повторюється, але у комбінованому режимі працює наступний датчик. Цикл продовжується, поки всі 4 датчики не випромінюють ультразвукові сигнали. На це потрібно близько 100 мілісекунд. Модуль керування виконує кілька вимірювань сигналів одного і того ж датчика, щоб унеможливити випадкові помилки при обчисленнях.
Якщо об'єкт знаходиться суворо навпроти датчика, відстань розраховується за часом між передачею та прийомом сигналу. Якщо перешкода розташована між двома датчиками, модуль управління обчислює відстань по сигналах двох датчиків, вирішуючи завдання тріангуляції.
Для вирішення задачі тріангуляції модулю управління повинна бути відома відстань між окремими датчиками бампера. Ця інформація зберігається у пам'яті модуля управління. Знаючи відстані від кожного датчика до перешкоди та відстань між сусідніми датчиками, модуль управління може обчислити мінімальну відстань від бампера автомобіля до перешкоди.
При під'їзді автомобіля одночасно до кількох перешкод модуль керування визначає відстань до найближчого з них.
Коментарі до цієї статті