When the reverse parking assist system is activated, the system control module illuminates the LED indicator in the switch button, turns on the sensors, and commands the system to emit a single beep to confirm the system is on. If an object enters the range of the sensor, a sequence of audible warning signals will immediately sound when the system is turned on.
If the operation of the parking assistance system is not required, then it can be temporarily disabled by pressing the switch button. For vehicles equipped with rear sensors only, the system can be reactivated by pressing the switch again or by switching the ignition off and on again. The system will then automatically engage when reverse gear is selected. The system remains active when shifting from reverse to neutral. This takes into account the likelihood that the driver will continue (in any way) move the vehicle backwards with the transmission in neutral.
When a trailer is connected, the parking aid module receives a signal via the CAN bus from the central electrical box. Upon receiving such a signal, the parking assistance system control module suspends the system.
On vehicles equipped with front and rear sensors, the parking assistance system is automatically activated when the ignition is on (position II), the selector is not in the Park position and the electronic parking brake is off. At speeds above 10 km/h, the front parking aid is deactivated. When the vehicle speed drops below 6 km/h, the front parking assistance system will resume operation. If the electronic parking brake is activated (EPB) or the selector is placed in the Park position, the parking assistance system is turned off.
Sensor operation
The parking assistance system module analyzes the data received from the sensors in order to detect obstacles in the field of action of the sensors. If no obstacles are detected, the parking assistance system does not emit any beeps. If an obstacle is detected, the park assist speaker will emit a series of beeps.
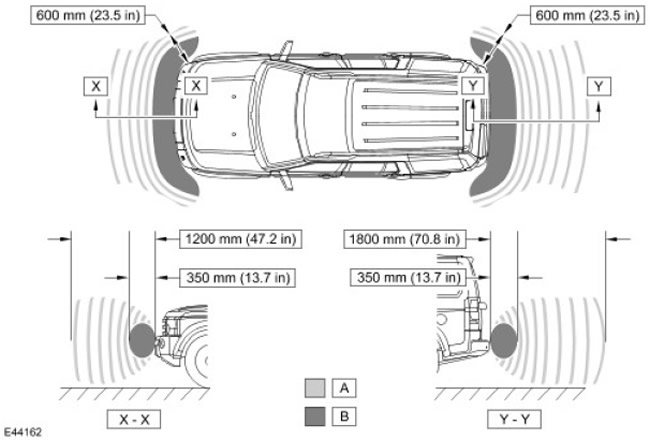
The maximum obstacle detection distance is 1800 mm. When an obstacle is detected, as you approach it, the gap between the sound signals decreases, and at a distance of approximately 350 mm from the obstacle, the sound signal becomes continuous.
If there is no further decrease in the distance between the obstacle and the central sensors from the moment the obstacle is detected, then the interval between the sound signals does not change. If an object is detected by only one edge sensor, the alarm will stop after 5 seconds if there is no change in the distance from the object to the edge sensor.
Detection zone
| Item name | Spare part number | Description |
| A | - | Intermittent warning tone |
| B | - | Continuous warning sound |
Obstacle detection and distance calculation
Operating in a combined receive/transmit mode, the sensor emits ultrasonic pulses and receives signals reflected from an obstacle. The parking assistance control module amplifies the reflected signals and compares them to programmed thresholds to calculate the distance. This is achieved by determining the time elapsed between the transmission and reception of the ultrasonic signal.
When the sensor is in receive mode, it receives radiation signals from the adjacent sensor. This mode is used to improve the accuracy of the system.
The obstacle detection cycle consists in the transmission and reception of a series of pulses by one sensor operating in a combined mode at the commands of the parking assistance system control module.. Then the computer switches this, as well as neighboring sensors, to receive only the reflected signal. After a short pause, the operation is repeated, but now the next sensor works in combined mode. The cycle continues until all 4 transducers emit ultrasonic signals. This takes about 100 milliseconds. The control module performs several measurements of the signals of the same sensor in order to eliminate random errors in the calculations.
If the object is directly opposite the sensor, the distance is calculated from the time between signal transmission and reception. If the obstacle is located between two sensors, the control module calculates the distance from the signals of the two sensors, solving the triangulation problem.
To solve the triangulation problem, the control module must know the distance between the individual sensors in the bumper. This information is stored in the memory of the control module. Knowing the distances from each sensor to the obstacle and the distance between adjacent sensors, the control module can calculate the minimum distance from the vehicle's bumper to the obstacle.
When the car approaches several obstacles at the same time, the control module determines the distance to the nearest one.
Comments on this article