Када је систем помоћи при паркирању уназад активиран, контролни модул система пали ЛЕД диоду на дугмету прекидача, активира сензоре и наређује систему да емитује један звучни сигнал како би потврдио активацију система. Ако објекат уђе у домет сензора, низ звучних сигнала упозорења ће се одмах огласити када се систем укључи.
Ако није потребан рад система за помоћ при паркирању, он се може привремено искључити притиском на дугме за прекидач. За возила опремљена само задњим сензорима, систем се може поново активирати поновним притиском на прекидач или искључивањем и поновним укључивањем контакта. Систем ће се тада аутоматски укључити када се изабере брзина за вожњу уназад. Систем остаје активан када се мења из уназад у неутрални положај. Ово узима у обзир вероватноћу да ће возач наставити (на било који начин) померите возило уназад са мењачем у неутралном положају.
Када је приколица повезана, модул помоћи при паркирању прима сигнал преко ЦАН магистрале из централне електричне кутије. По пријему таквог сигнала, управљачки модул система помоћи при паркирању суспендује систем.
На возилима опремљеним предњим и задњим сензорима, систем помоћи при паркирању се аутоматски активира када је контакт укључен (позиција ИИ), бирач није у положају Парк и електронска паркирна кочница је искључена. При брзинама изнад 10 км/х, предња помоћ при паркирању се деактивира. Када брзина возила падне испод 6 км/х, предњи систем помоћи при паркирању ће наставити са радом. Ако је електронска паркирна кочница активирана (EPB) или је селектор постављен у положај Парк, систем помоћи при паркирању је искључен.
Рад сензора
Модул система за помоћ при паркирању анализира податке примљене од сензора како би открио препреке у пољу деловања сензора. Ако се не открију никакве препреке, систем помоћи при паркирању не емитује никакве звучне сигнале. Ако се открије препрека, звучник за помоћ при паркирању ће емитовати низ звучних сигнала.
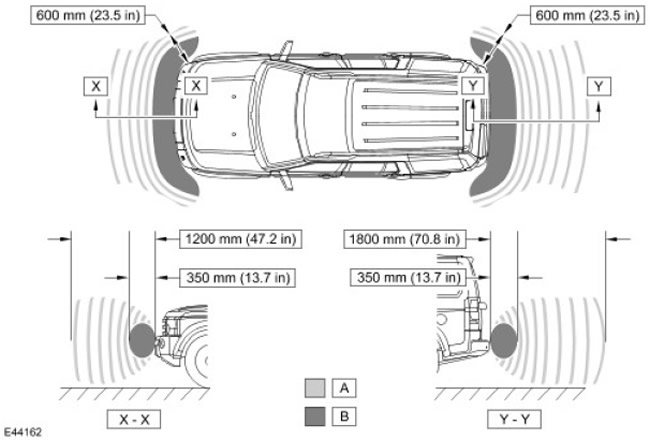
Максимална удаљеност детекције препрека је 1800 мм. Када се открије препрека, док јој се приближавате, размак између звучних сигнала се смањује, а на удаљености од приближно 350 мм од препреке, звучни сигнал постаје непрекидан.
Ако не дође до даљег смањења удаљености између препреке и централних сензора од тренутка када је препрека откривена, онда се интервал између звучних сигнала не мења. Ако објекат детектује само један сензор ивице, аларм ће престати након 5 секунди ако нема промене у удаљености од објекта до сензора ивице.
Зона детекције
| Назив производа | Број резервног дела | Опис |
| A | - | Испрекидани тон упозорења |
| B | - | Непрекидан звук упозорења |
Откривање препрека и прорачун удаљености
Радећи у комбинованом режиму пријема/преноса, сензор емитује ултразвучне импулсе и прима сигнале који се одбијају од препреке. Контролни модул за помоћ при паркирању појачава рефлектоване сигнале и упоређује их са програмираним праговима да би израчунао растојање. Ово се постиже одређивањем времена које је протекло између преноса и пријема ултразвучног сигнала.
Када је сензор у режиму пријема, он прима сигнале зрачења од суседног сензора. Овај режим се користи за побољшање тачности система.
Циклус детекције препрека се састоји у преносу и пријему серије импулса од стране једног сензора који ради у комбинованом режиму на команде контролног модула система за помоћ при паркирању.. Затим рачунар пребацује овај, као и суседне сензоре, да прими само рефлектовани сигнал. После кратке паузе, операција се понавља, али сада следећи сензор ради у комбинованом режиму. Циклус се наставља све док сва 4 претварача не емитују ултразвучне сигнале. Ово траје око 100 милисекунди. Управљачки модул врши више мерења сигнала истог сензора како би се елиминисале случајне грешке у прорачунима.
Ако је објекат директно наспрам сензора, растојање се израчунава из времена између преноса и пријема сигнала. Ако се препрека налази између два сензора, контролни модул израчунава растојање од сигнала два сензора, решавајући проблем триангулације.
Да би се решио проблем триангулације, контролни модул мора знати растојање између појединачних сензора у бранику. Ове информације се чувају у меморији контролног модула. Познавајући растојање од сваког сензора до препреке и растојање између суседних сензора, контролни модул може израчунати минимално растојање од браника возила до препреке.
Када се аутомобил приближи неколико препрека истовремено, контролни модул одређује удаљеност до најближе.
Коментари на овај чланак