| Item name | Spare part number | Description |
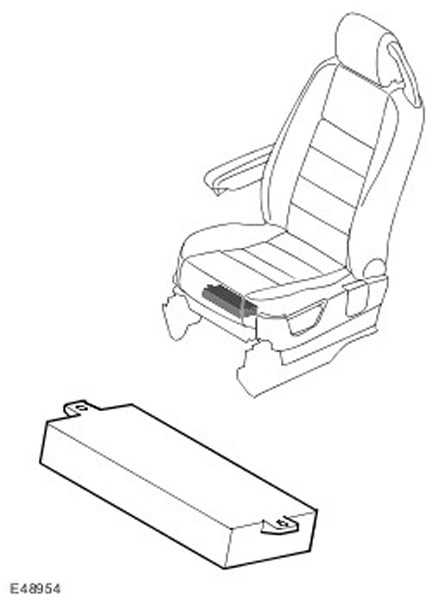
| 1 | - | Memory controller |
The memory controller, located under the driver's seat, receives a number of inputs and generates a number of outputs. Like any other electronic control module, the memory controller must receive information about the current state of the engine and related systems. Based on the received data, the controller performs calculations that determine the nature of the output (managers) signals.
All parameters are stored in non-volatile memory, EEPROM. The current positions of the electric motors are constantly monitored by the controllers using built-in Hall sensors and recorded in the EEPROM memory. If there is a power outage, then after the power is restored, the stored positions of the electric motors are taken as the current positions. This allows the relative stored positions to be restored without recalibration. The memory controller checks the integrity of the data in the EEPROM memory each time it wakes up. In the event of data corruption, the memory controller resets all programmable parameters to factory defaults. All memorized adjustments are invalidated, and the programs work as if no settings were recorded in memory. Functions based on data stored in memory will reload the corresponding memory location and remain fully functional.
Determination of jamming mechanisms
The system considers that the electric motor for moving the seat, steering column (in the presence of) or rear-view mirrors stalled if there is no change in the input signal coming through the feedback line from the corresponding sensor for a certain time while the electric motor is running (within 200 milliseconds for the seat and within 1000 ms for the mirrors and steering column).
If a mechanism jam is detected, movement along the corresponding axis is canceled, both for the case of recalling the position from the memory, and when pressing the switch (manual adjustment).
If the motor stops due to a loss of communication with the encoder, a jammed mechanism, or a defective encoder, movement on that axis can be restarted to pass «sticking point». To do this, click on the appropriate switch. In this way, it is possible to maintain control of the electric motor when the feedback signal from the sensor is interrupted.
If a pulse signal is received after resuming the movement of the deliverer, the movement will continue until the switch is released or until a stall occurs again due to a sticking mechanism. If the feedback does not resume, the motor will only run for 0.5 seconds and then stop until the switch is released and pressed again.
With any movement in manual control mode, the memory memory control unit remembers the point at which the jam occurs. If the movement continues beyond the sticking point, then the memorized position is deleted from memory. This happens in all cases when the mechanism is displaced beyond the memorized sticking point. This is true both for manual adjustment and for recalling a position from memory.
Initialization
When replacing the under-seat memory management unit, it must be initialized, i.e. need it «educate» extreme positions of the seats and steering column. This is done as follows:
- performing all possible adjustment movements of the seat from one extreme position to another (longitudinal direction, backrest inclination, cushion height and position)
- performing all possible adjustment movements of the steering column from one extreme position to another (slope and distance).
Battery monitoring
If the battery voltage drops below 10.5 V, the memory control unit ignores all requests to restore the settings of the mirrors and seats, including the function «Lazy Entry», until the voltage rises to 11.5 V. This is necessary to conserve battery power in order to maintain the ability to start the engine.
Standby mode
The controller supports a standby mode to keep power consumption to a minimum.
The memory control unit enters sleep mode after receiving a SLEEP signal on the LIN bus (Sleep) from the central switching unit (CJB). In addition, the standby mode is entered three seconds after the LIN bus signals stop receiving, provided that during this time there is no movement of the motors and there is no request for adjustment.
In the event of a LIN bus failure, seat operation will only be possible in slow motion mode ('inch mode').
If the memory controller cannot enter standby mode due to motor operation, a reset request, or a switch being pressed, it will enter standby mode immediately after the operation is completed.
NOTE: If adjustments are recalled from memory, adjustments to all axes will be completed before the system goes into standby mode, not just the one being performed by the currently running electric motor.
The memory controller wakes up when LIN bus signaling resumes. When the memory controller enters standby mode, it should check the system resume conditions (System Enable Status), to know when to respond to a switch request.
Comments on this article